It didn't take too much searching to find several alternatives to using a mouse chip to interface to the shaft encoders. I settled on next trying a device resold by the company from which I purchased the shaft encoders, US Digital. The device is called an LS7266R1 and you can find the data sheets for the chip here.
After quite some trouble sorting out an interfacing problem between the 5 Volt LS72661R1 device and the 3.3 Volt bus on my microcontroller, I now have it operational. Thankfully, this solution works perfectly and my shaft encoders are clocking without the loss I saw with the serial mouse chip.
You can configure the device to work in x1, x2 and x4 quadrature modes (resulting in 512, 1024 and 2048 counts per revolution from a 512 count shaft encoder). I've set up the x4 mode for my telescope application. I provided the LS72661R1 with a clock of about 100 kHz and set the internal divider to divide by 10. With the x4 quadrature mode, this sets the maximum shaft velocity to approximately 4 revolutions per second - more than enough.
Now that the shaft encoders are working properly, I can set to finishing the mechanics, electronics and software!
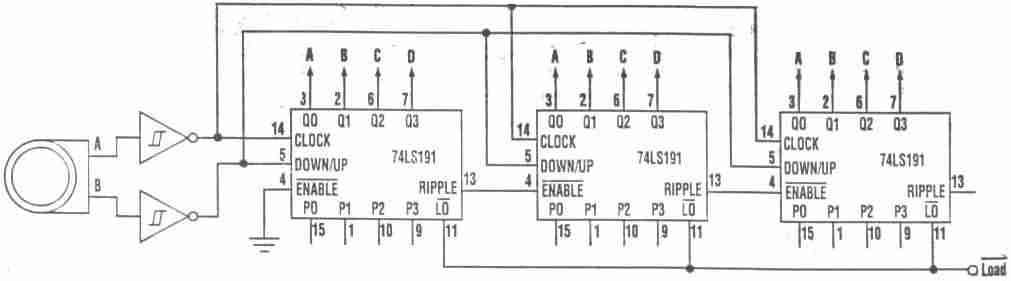
As a postscript, I received an email from Tim Goodpaster pointing me towards a design which appeared in the March 3, 1997 issue of Electronics Design. This design uses standard 74xx191 devices connected directly to the outputs of the shaft encoder to drive a binary up/down count of the shaft position. If you have room to spare and don't require the level of integration provided by the LS7266R1 solution, this circuit is likely to be as simple and cheap as you could discretely implement.
Contact me
Return to my design notes page.
Return to my telescope page.
{kind=link}